(!)Internet Explorer 11は、2022年6月15日マイクロソフトのサポート終了にともない、当サイトでは推奨環境の対象外とさせていただきます。
カテゴリ・メーカーから探す
メカニカル部品系
筐体・調整締結・素材
- フレーム・サポート部品・支柱
- キャスタ・アジャスタ・扉部品・外装部品
-
ねじ・ボルト・ナット・ワッシャ・カラー
ねじ・ボルト・ナット・ワッシャ・カラー
-
六角穴付きボルト
-
六角ボルト
-
小ねじ
-
止めねじ
-
座金組込みねじ
-
蝶ボルト・つまみねじ・化粧ビス
-
ストリッパ・リーマ・ショルダーボルト
-
でんでんボルト
-
アイボルト
-
樹脂ねじ・セラミックねじ
-
全ねじ・スタッドボルト
-
いたずら防止ねじ
-
配管Uボルト
-
ユニファイねじ・インチねじ・ウィットねじ
-
マイクロねじ・微細ねじ
-
脱落防止ねじ
-
タッピングねじ・タップタイト・ハイテクねじ
-
ドリルねじ
-
四角ボルト・丸ボルト
-
貫通穴付ボルト
-
ねじ用アクセサリー・カバーキャップ
-
座金(ねじ用ワッシャ)
-
ナット
-
アンカーボルト
-
リベット・鋲
-
インサート
-
建材用スクリュー
-
ねじ用工具類
-
ワッシャ・カラー
-
シム
-
スナップピン・割りピン
-
マシンキー
-
止め輪・リング
-
スクリュープラグ
-
アジャスタ
-
ノックピン・段付ピン・スプリングピン
-
-
ばね・アブソーバ・調整締結・ピン・小物部品
-
素材(金属・樹脂・ゴム・スポンジ・ガラス)
素材(金属・樹脂・ゴム・スポンジ・ガラス)
-
対策・メンテナンス関連

































































空圧・油圧・配管・温調部品
































回転伝達・コンベヤ・モータ・ロボット



























直動・センサ・位置決め・ステージ




























特注部品・図面加工部品
電気系












































金型系




















消耗品・補修用品・備品系
切削加工用品
-
切削工具
切削工具
-
エンドミル
-
フライスチップ・ホルダー
-
ヘッド交換式工具
-
自由指定直刃エンドミル
-
専用カッター
-
旋削チップ
-
旋削ホルダ
-
完成バイト・ロウ付けバイト
-
ローレット
-
ドリル
-
ドリル関連部品・用品
-
タップ
-
タップ関連部品・用品
-
ダイス
-
ダイス関連部品・用品
-
ねじ山修正・除去工具
-
タップ・ダイスセット
-
ねじ切りカッター
-
リーマ
-
面取りカッター
-
面取りカッター関連部品・用品
-
切削工具関連備品
-
ホールソー・コアドリル・クリンキーカッター
-
ホールソー・コアドリル・クリンキーカッター関連部品
-
磁気ボール盤カッター
-
ボーリングシステム
-
ツーリングホルダ・ツーリングチャック
-
アングルヘッド
-
コレット
-
スリーブ・ソケット(ツーリング)
-
アーバ
-
ツーリング関連部品・用品
-
加工物基準位置測定器
-
芯出しバー
-
刃先位置測定器
-
ツールプリセッター
-
テストバー
-
プリセッター・芯出し・位置測定工具関連部品・用品
-
クーラントライナー・クーラントシステム
-
エアージェット・エアークーラー
-
クーラント関連部品・用品
-
円テーブル・ロータリーテーブル
-
- 工作機工具・治具











































生産加工用品
-
測定工具・計測機器
測定工具・計測機器
-
ノギス
-
pH計・導電率計
-
ノギス関連アクセサリ
-
マイクロメーター
-
検知管
-
ダイヤルゲージ
-
ダイヤルゲージ関連部品・用品
-
ピンゲージ
-
ピンゲージ関連部品・用品
-
ハイトゲージ
-
流量計
-
ハイトゲージ関連部品・用品
-
リングゲージ
-
デプスゲージ
-
シックネスゲージ・すきまゲージ
-
内径測定器
-
ゲージ
-
スコヤ
-
定規
-
コンベックス
-
巻尺
-
はかり
-
角度計
-
光学機器
-
水平器
-
レーザー測定器
-
マグネット関連
-
定盤
-
数取器・カウンタ
-
ガス測定器・検知器
-
ケガキ用品
-
ストップウォッチ・タイマー
-
テンションゲージ
-
環境測定器
-
温度計・湿度計
-
圧力計
-
顕微鏡
-
天秤・天秤関連品
-
分銅
-
硬度計
-
振動計・回転計
-
水質・水分測定器
-
粘度計
-
膜厚計・探知器
-
偏心測定器
-
表面粗さ測定器
-
音検出器
-
測定データ機器
-
アースメータ(接地抵抗計)
-
テスタ・マルチメータ
-
オシロスコープ
-
クランプメータ
-
検相器・検電器・導通チェッカ
-
絶縁抵抗計
-
ネットワークテスタ・ケーブルテスタ・光ファイバ計測器
-
安全試験器
-
回路素子測定器
-
信号源・ファンクションジェネレータ
-
電源装置
-
高周波測定器(RF測定器)
-
計測機器関連品
-
電圧計・電流計
-
電力計
-
その他電気計測器
-
- 放電加工用品
- 研削研磨・切断用品
-
手作業工具
手作業工具
-
スパナ・めがねレンチ・ラチェットレンチ
-
六角棒レンチ
-
モンキーレンチ
-
トルクスレンチ
-
ソケットレンチ
-
トルクレンチ
-
トルクレンチ関連部品・用品
-
トルク測定器
-
ドライバー
-
ドライバー関連部品・用品
-
トルクドライバー
-
トルクドライバー関連部品・用品
-
プライヤー
-
プライヤー関連部品
-
ニッパー
-
ニッパー関連部品
-
ペンチ
-
ペンチ関連部品
-
ハンマー
-
工具セット・ツールセット
-
工具セット・ツールセット関連部品・用品
-
カッターナイフ
-
タガネ
-
ドライバービット
-
ドライバービット関連用品
-
プーラ
-
刻印・ポンチ
-
車輌整備用工具
-
水道・空調配管用工具
-
切断用工具
-
絶縁工具
-
板金用工具
-
防爆工具
-
かしめ工具
-
電設工具
-
バール・テコ
-
ソケットビット
-
ソケットアダプター
-
ピンセット
-
-
電動工具・空圧工具
- 小型加工機・卓上加工機
- 溶接用品
- はんだ・静電気対策用品

























































































































































































MRO・工場用副資材



























































メーカーから探す
特集から探す
ロボット導入支援サービス
産業用ロボットの基本構成と動作する仕組みをご紹介します
<解説>
産業用ロボットの基本構成や動作の仕組みを部位ごとに解説します。
産業用ロボットの基本構成
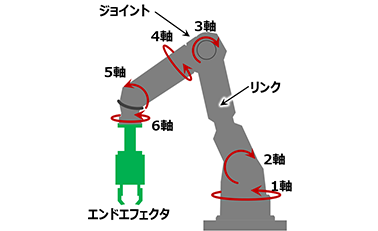
ロボットの構成は大きく分けて「マニピュレーター・駆動部」「センサー部」「制御部」の3つに分かれます。下図は6軸垂直多関節ロボットを例として各部の構成要素を示します。スカラロボットなど他ロボットにおいても基本的には同じ構成です。
- ・マニピュレーター・駆動部
- リンク、ジョイント、エンドエフェクタ、
アクチュエータ - ・センサー部
- エンコーダ、力覚センサーなど
- ・制御部
- 制御盤、ティーチングペンダント

産業用ロボットが動作する仕組み -マニピュレーター・駆動部-
マニピュレーター
マニピュレーターとはロボットのアーム部分を示し、人間の腕に例えると「骨=リンク」、「関節=ジョイント」、「手=エンドエフェクタ」から構成されます。エンドエフェクタによって物を掴んで移動させたり、溶接を行ったり、塗装を行ったりすることが可能です。ロボットの種類はマニピュレーターの構造によって以下のように分類できます。
■ 垂直多関節ロボット
リンクとジョイントを一つずつ動かしていく「シリアルリンクメカニズム」という構造。軸数は5軸、6軸、7軸あり。
■ パラレルリンクロボット
リンクとジョイントで作られる連結連鎖が、複数個並列(パラレル)に配置された「パラレルリンクメカニズム」という構造。

■ 水平多関節(スカラ)ロボット
1つの上下運動と3つの回転運動を持つ4軸構造。

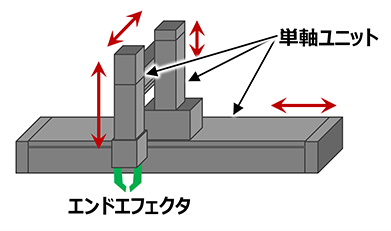
■ 直交ロボット
単軸直動ユニットを組み合わせたシンプルな構造。
■ 双腕ロボット
2本のアームは、リンクとジョイントで構成されており、人と共に働く「協働ロボット」と同じ条件で使用する場合が多い。

駆動部
駆動部は、マニピュレーター(リンク、ジョイント、エンドエフェクタ)を駆動させる部分でアクチュエータとも呼ばれます。
アクチュエータ(駆動部)はサーボモータ、減速機、ブレーキ、伝動機構から構成されます。
| (1)サーボモータ | 駆動部の主要部品。ロボットは繰り返し精度が求められるため位置・速度制御が高機能なサーボモータが利用されます。 なお、サーボモータの回転量を検出するエンコーダも駆動部の中にあります。 |
|---|---|
| (2)減速機 | サーボモータの力をアップさせるための装置です。 サーボモータ単体では出せる力に限りがあるため、減速機と組み合わせて大きな力が出します。 |
| (3)ブレーキ | ロボットの動きを瞬時に停止するために使用します。停電や電源が切れた場合に安全を確保します。 |
| (4)伝動機構 | アクチュエータや減速機を通して得た力を伝える要素で、力の向きや大きさを変えることも可能です。 ロボットのサーボモータは通常ジョイント付近に配置することが多いですが、 ベルトや歯車などの伝動機構を使うことで離れた場所に置くこともできます。 |
産業用ロボットが動作する仕組み -センサー部-
センサーには大きく2つの役割があります。1つは「アクチュエータ(駆動部)状態の計測」2つ目は「センサーが受けた信号をコンピュータが取り扱い可能な電気信号に置き換えること」です。ロボットのセンサーには、正確で円滑な動作のために ロボット自身の状態を計測する内界センサーと周囲の状況を判断して行動するために必要な情報を計測する外界センサーがあります。
内界センサーには、回転角度(回転量)を検出するエンコーダ、電圧センサー、電流センサーなどがあります。
外界センサーには、力覚センサー、カメラなどがあります。
(1)エンコーダ
エンコーダは、サーボモータの回転角度(回転量)を検出する内界センサーです。
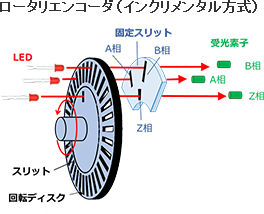
サーボモータ軸に取り付けられたコードホイール(回転ディスク)と呼ばれる回転円盤に放射方向にスリット(穴)をあけて、スリットを光が通過するかしないかを光センサーで検出する方式です。
スリットを通過すると光パルスの信号(一定の幅を持った信号の波)が変化し、この光パルスを受光素子で検出し、電気信号に変換して出力します。パルスの数を数えればモーター軸の回転量がわかります。
ロボットのサーボモータの回転量検出で広く使用されているエンコーダは、ロータリエンコーダです。計測方式によって「インクリメンタル方式」と「アブソリュート方式」の2種類に分けることができます。
インクリメンタル方式は、ある位置から次の位置までの移動量を検知するタイプのエンコーダで相対角度検知タイプとも言います。モーター軸の角度変化を出力します。
アブソリュート方式は、原点からどれくらい離れた位置にいるかを検知するタイプのエンコーダで、絶対角度検知タイプとも言います。モーター軸の絶対角度を出力します。
(2)力覚センサー
力覚センサーは、複数方向の力やモーメントを同時にリアルタイムに検出することができる外界センサーです。X、Y、Zの3方向の力(Fx、Fy、Fz)と各軸まわりのトルク(Mx、My、Mz)を計測できる6軸力覚センサーが広く使用されています。6軸力覚センサーは、負荷の状態をすべて把握することができます。
力覚センサーは、物体のひずみを測定するゲージをセンサー内部の力を受ける箇所(起歪体)に接着し、力に応じて一緒に伸縮します。この伸縮の変化を電圧変化として捉え、アンプ(増幅器)で増幅し比較的大きな電圧変化に変換して読み取っています。
力覚センサー情報を用いて、ロボットに人の手のような感覚を持たせることができ、今までのロボットでは難しかった微小な力加減を必要とする作業が実現できるようになります。

産業用ロボットが動作する仕組み -制御部-
制御部とはロボットを制御する人間に例えると脳(知能)に相当する部分です。制御盤とティーチングペンダントで構成されます。
制御盤
制御盤にはロボットを制御するコンピュータ(PLC)が搭載されています。駆動部やセンサーを全てコンピュータ(PLC)に接続して、あとの処理をソフトウエアで行うようにすると、複雑な処理がしやすくなったり、何かあったときにプログラムの修正で済ませることができるようになります。なお、PLCとは”プログラマブル・ロジック・コントローラ”の略でコンピュータのことですが、事務用のパソコン(PC)と区別するために、旋盤のような自動機械やロボットを制御するコンピュータをPLCと呼んでいます。制御方法の代表例はPTP(Point To Point)制御とCP(Continuous Path)制御が挙げられます。
(1)PTP(Point To Point)制御
目標点への位置決め制御を意味し途中経路は問題としない制御
<用途例>
・搬送…目標位置への移動位置を重視する作業
・スポット溶接…目標位置点の溶接作業
(2)CP(Continuous Path)制御
連続経路(Continuous path)に追従させる制御を意味し、目標軌道を指定するための制御
<用途例>
・アーク溶接…溶接対象箇所への連続経路が重視される作業

ティーチングペンダント
ティーチングペンダント
ロボットに作業手順や位置情報の記憶など設定するために使用する操作機器を示します。上記のような設定作業を教示(ティーチング)と呼びます。実際にロボットを動かしながら位置情報を記憶させ、作業者が目視で位置を確認できます。工作機のような専用パソコンによるプログラム設定と異なり、比較的に操作が簡単なためティーチング方式による制御が主流となっています。
近年はティーチング方法がさらに改良され、ロボットアームを直接、手で動かしながら位置情報を記憶させる「ダイレクトティーチング」も登場しています。

ロボット導入はミスミにご相談ください
MiBOT[ミボット]
多彩なカスタム式ロボットパッケージ。自動化のご相談ならミスミ
汎用的なパレタイザーから最新のAI外観検査までロボットパッケージを多数掲載
ミスミパートナー企業と共にお客さまのロボット導入をトータルサポートします
バラ積みピッキング
![]() 1,260万円~
1,260万円~
![]() 6.5ヵ月~
6.5ヵ月~
アーク溶接
![]() 880万円~
880万円~
![]() 5.0ヵ月~
5.0ヵ月~
AI外観検査

![]() 1,100万円~
1,100万円~
![]() 7.0ヵ月~
7.0ヵ月~